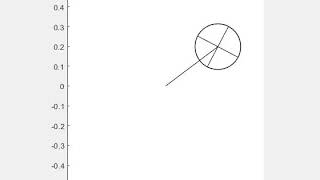
Media Summary: Mechatronics Project at San Jose State University. HOMD observer + LQR controller, first run. All math is accessible here (in russian): ... In this work, the practical implementation of the control system for the
Overview
Inverted Pendulum Reaction Wheel - Detailed Analysis
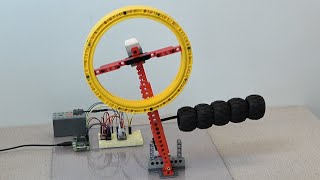
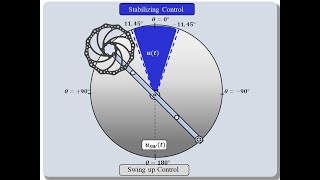
Mechatronics Project at San Jose State University. HOMD observer + LQR controller, first run. All math is accessible here (in russian): ... In this work, the practical implementation of the control system for the Implementation of the Swing-up algorithm in a Natural response of reaction wheel inverted pendulum This was a take home lab experiment created by Oklahoma State University and created by a Senior Design Team. Here is a link ...
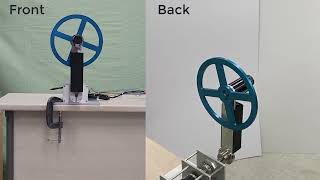
Supplemental material video for our paper on adaptive stabilization by delay: 00:04 Experiment 1 ... Georgia Tech ME 4012 Fall 2020 Final Project. This is our machine, not long after we first got it to balance. It used 3rd order control based on a rate gyroscope, an incremental ...
Gallery
Photo Gallery









Related