Media Summary: Conference material from 22nd Polish Control Conference (PCC) In release 4.0, we advanced Spot's locomotion abilities thanks to the power of Presented by Pieter Abbeel at SBRS 2014. The Stanford-Berkeley
Overview
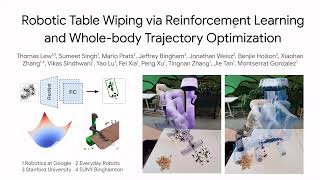
Optimizing Robotic Palletization Reinforcement Learning Approach - Detailed Analysis
Conference material from 22nd Polish Control Conference (PCC) In release 4.0, we advanced Spot's locomotion abilities thanks to the power of Presented by Pieter Abbeel at SBRS 2014. The Stanford-Berkeley In this episode I introduce Policy Gradient This video presents student project results from Tampere University Reward-Adaptive Reinforcement Learning: Dynamic Policy Gradient Optimization for Bipedal Locomotion
How does AI learn to win at chess, drive cars, or train digital twins? The answer is RL. That's the magic of This is not a final result, but a test for research. We use Rainbot
Gallery
Photo Gallery










Related

