Media Summary: A fast point cloud ground segmentation approach based on coarse-to-fine MRF(urban scene) This video belongs to our paper submitted to IV 2018 (published): Patrick Burger and Hans-Joachim Wuensche, " This video presentation describes the work in the paper titled: KPU-Net: Kernel Point Unet for 3D LiDAR
Overview
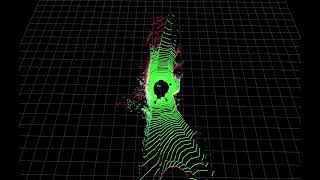
Patchwork Fast And Robust Ground Segmentation Solving Partial Under Segmentation - Detailed Analysis
A fast point cloud ground segmentation approach based on coarse-to-fine MRF(urban scene) This video belongs to our paper submitted to IV 2018 (published): Patrick Burger and Hans-Joachim Wuensche, " This video presentation describes the work in the paper titled: KPU-Net: Kernel Point Unet for 3D LiDAR A fast point cloud ground segmentation approach based on coarse-to-fine MRF(off road scene)
Gallery
Photo Gallery









![[IROS21] Patchwork: Concentric Zone-based Region-wise Ground Seg. with Ground Likelihood Estimation](https://i.ytimg.com/vi/rclqeDi4gow/mqdefault.jpg)
Related



