Scan Matching Localization - Detailed Analysis
In today's lecture I will introduce the concept of LiDAR normal distribution transform (NDT) Consider the video of the 2013/14 course as the audio quality is much better: ... In this project my goal is to localize a car driving in simulation for at least 170m from the starting position and never exceeding a ... [Autoware][Localization] NDT Scan Matching Fixed in Tunnel 터널 구간 측위 문제 해결 [Autoware][Localization] NDT Scan Matching Fail in Tunnel 터널 구간 측위 실패
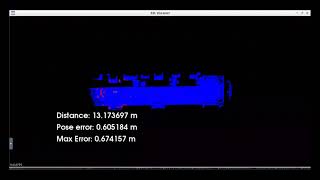
Done for Udacity Self Driving Car Engineer Nanodegree. An ICP is configured and fine-tuned to make the max error below 1 m. This is the output video from a Carla simulation of Done for Udacity Self Driving Car Engineer Nanodegree. An ICP is configured and fine-tuned to Scan Matching Localization with LIDAR Point Clouds - ICP Algorithm This research was presented in IEEE Intelligent Vehicles Symposium 2017. ResearchGate ... F1TENTH Autonomous Racing Course - Lecture 6 Topic:
Accompanying video for our IEEE Sensors Letter submission tilted on "Performance Evaluation on NDT Map-based
Photo Gallery







![[Autoware][Localization] NDT Scan Matching Fixed in Tunnel | 터널 구간 측위 문제 해결](https://i.ytimg.com/vi/3hNn2kLvExo/mqdefault.jpg)

![[Autoware][Localization] NDT Scan Matching Fail in Tunnel | 터널 구간 측위 실패](https://i.ytimg.com/vi/fG0eZAI6mgU/mqdefault.jpg)




![F1tenth (F1/10) Lecture 8]: Scan Matching with LIDAR data](https://i.ytimg.com/vi/LETPf6eoyYg/mqdefault.jpg)



